|
HyperspaceExplorer 0.7.1
|
|
HyperspaceExplorer 0.7.1
|
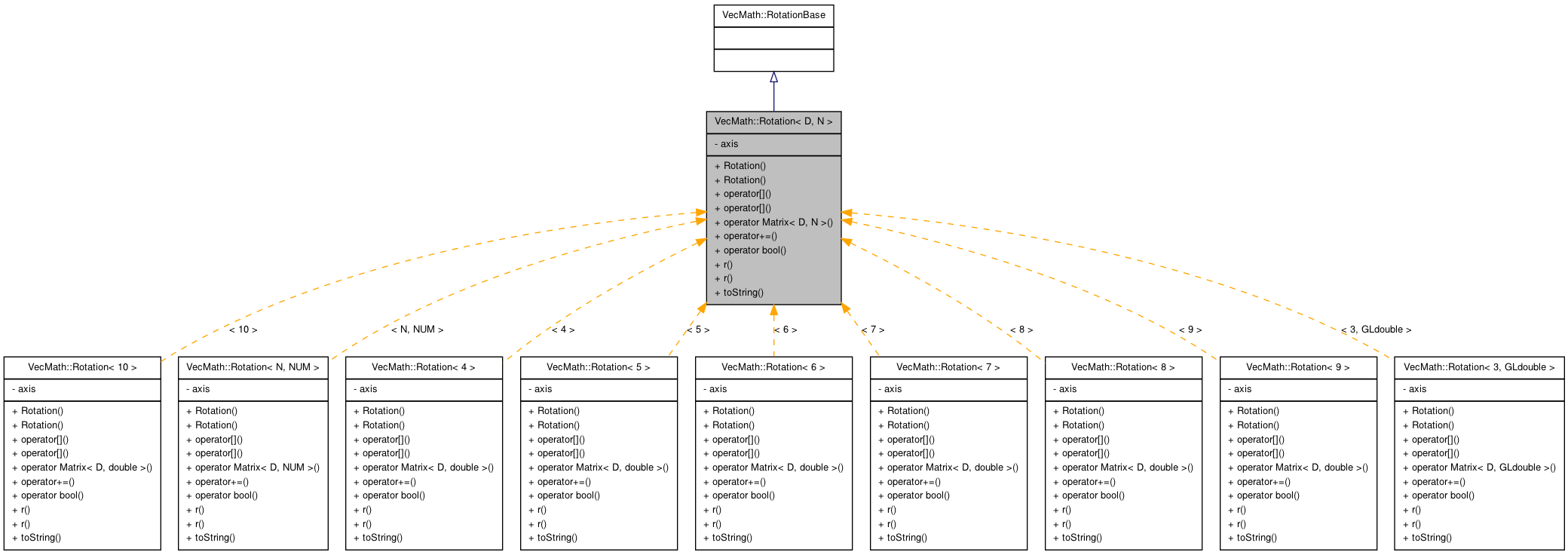
Rotation in D-dimensional space defined by angles about the main axes. More...
#include <Rotation.h>
Public Member Functions | |
| Rotation () | |
| default constructor, zero rotation | |
| Rotation (N r0,...) | |
| Constructor with variable arglist. | |
| N & | operator[] (unsigned i) |
| Returns a reference to component i. | |
| N | operator[] (unsigned i) const |
| Returns component i by value. | |
| operator Matrix< D, N > () const | |
| Creates a rotation Matrix from the angles. | |
| Rotation< D, N > & | operator+= (const Rotation< D, N > &that) |
Adds another Rotation to this. | |
| operator bool () const | |
| true if rotation is nonzero | |
|
const Vector< NumAxes< D > ::num, N > & | r () const |
| access the stored values (needed by output operator <<()) | |
| Vector< NumAxes< D >::num, N > & | r () |
| write access the stored values (needed by input operator >>()) | |
| std::string | toString () const |
| Convert Rotation to a std::string. | |
Private Attributes | |
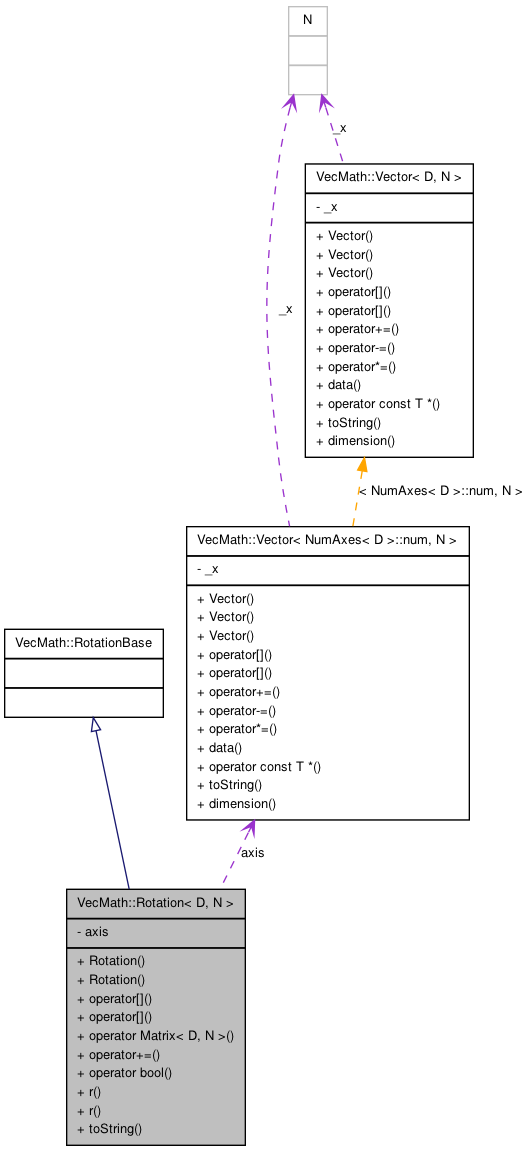
| Vector< NumAxes< D >::num, N > | axis |
| Rotation angles are stored as a Vector, operations are delegated. | |
Rotation in D-dimensional space defined by angles about the main axes.
| D | dimension of the vector space |
| N | numerical type of the rotation angles |
| VecMath::Rotation< D, N >::Rotation | ( | N | r0, |
| ... | |||
| ) |
Constructor with variable arglist.
| r0 | angle about first rotation axis |
| ... | angle about the other axes |
References VecMath::Rotation< D, N >::axis, num, and va_end.
| VecMath::Rotation< D, N >::operator bool | ( | ) | const |
true if rotation is nonzero
References VecMath::sqnorm().

| VecMath::Rotation< D, N >::operator Matrix< D, N > | ( | ) | const |
Creates a rotation Matrix from the angles.
default implementation does not work correctly yet
move out of the class
References VecMath::RotationAxes< D >::axis(), num, and operator[]().

| Rotation< D, N > & VecMath::Rotation< D, N >::operator+= | ( | const Rotation< D, N > & | that | ) |
Adds another Rotation to this.
| that | other Rotation |
*this+that References VecMath::Rotation< D, N >::axis.
| N VecMath::Rotation< D, N >::operator[] | ( | unsigned | i | ) | const |
Returns component i by value.
| i | index of the element |
| N & VecMath::Rotation< D, N >::operator[] | ( | unsigned | i | ) |
Returns a reference to component i.
| i | index of the element |
 1.7.4
-
Hosted by
1.7.4
-
Hosted by
